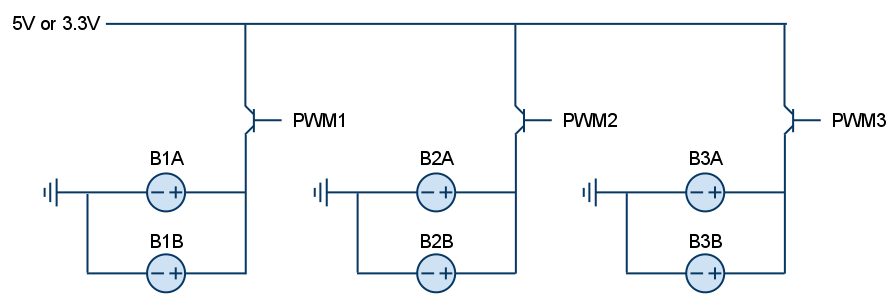
Today, we decided on how we are going to implement each of the buzzers that lie on the waist of the user. We are going to write three bytes to the serial output of BeagleBoard (/dev/ttyS0) and read these values in the serial in of the mbed board (pins 9 and 10). The first two bits of each of these bytes will correspond to each of three buzzers and the other six bits will correspond to an intensity. This gives each buzzer 64(!) levels of granularity ranging from a 0% to 100% duty cycle. The mbed will read each of the values and adjust the pwm signal for each buzzer. Each buzzer operates at a max of 3.6V, but we have tested them up to 5V. The mbed has 5V and 3.3V outputs, so we will have to decide which pin to use in the future.
We also decided that we are going to use a 11.1V LiPo 3000mAh battery to power our entire system. We will use this to power the kinect and use 5V regulator with a heat sink to reduce this voltage to 5V for the beagleboard and mbed. LiPo batteries are lightweight and will power our entire system for a few hours before needing recharging.
Today we also upgraded our Beagleboard to run on a 16 GB MicroSD card which will make installing packages and compiling much easier.